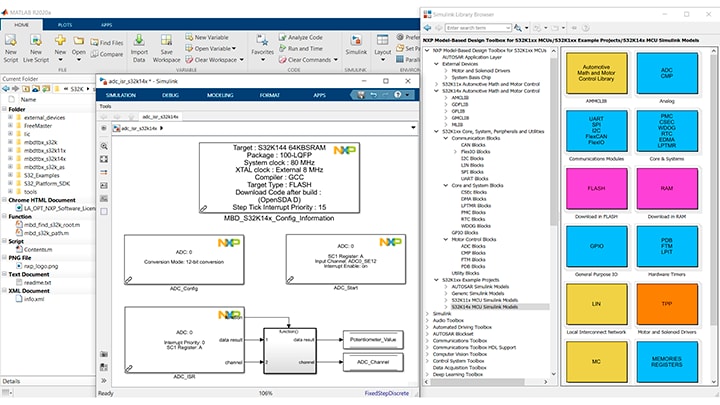
NXP's Model-Based Design Toolbox enables rapid prototyping of complex algorithms on NXP hardware from MATLAB/Simulink. It provides a gateway between the MathWorks and the NXP's ecosystems of software solutions. By its integration with MathWorks, MBDT offers a model-centric application development environment and provides access to a suite of ready-to-use toolboxes, hardware agnostic algorithms simulation and automatic code generation from MATLAB scripts and Simulink models, together with built-in support for Software-in-the-Loop (SIL) and Processor-in-the-Loop (PIL) verification and validation workflows.
MBDT incorporates all the necessary sources to tailor designs for NXP targets, interfacing the hardware access with a library of blocks generating code on top of platform specific optimized drivers (for example, SDK, RTD, BMS SDK, RSDK). It allows configuration of the on-board peripherals, pins and clocks in dedicated environments like NXP's S32 Configuration Tools/MCUXpresso Configuration Tools and EB Tresos, and enables the usage of optimized libraries like Automotive Math and Motor Control (AMMCLib), Real Time Control Embedded Software Motor Control and Power Conversion Libraries (RTCESL), hardware accelerator (for example, SPF2) libraries, and bit-accurate simulation results in the Simulink environment (for example, SPT).
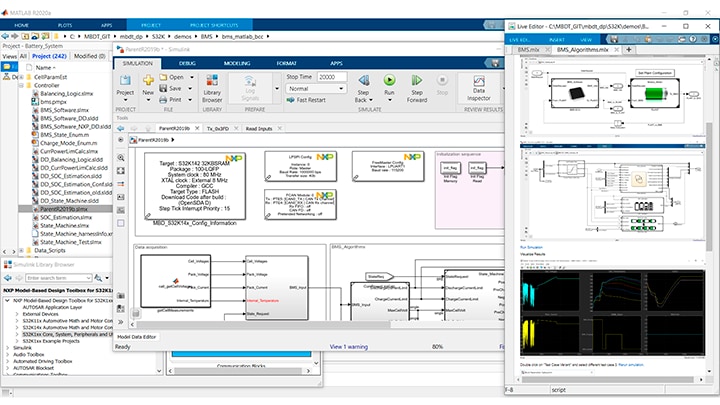
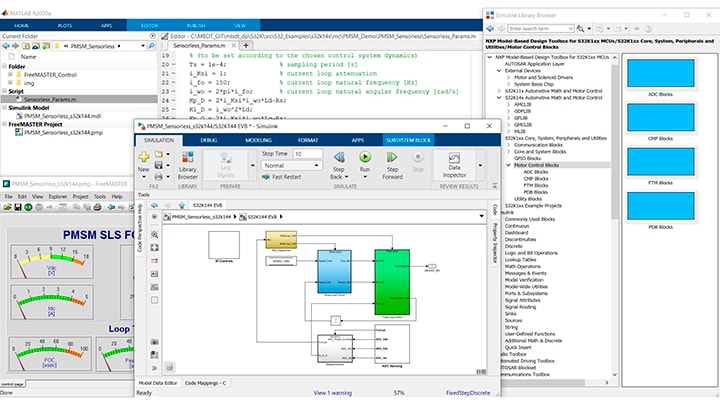
By including multiple compiler options, MBDT enables a streamlined process of simulating, generating code, compiling it, and automatically deploying it on NXP's hardware cores and accelerators, facilitating the development process for complex solutions such as (but not limited to) motor control algorithms, battery management systems, RADAR applications, and sensor-based and communication protocols, helping engineers and embedded developers to shorten project life cycles.