Getting Started with TWR-KE18F Board
Contents of this document
-
Plug It In
-
Get Software
-
Build, Run
-
Create
Sign in to save your progress. Don't have an account? Create one.

Purchase your Kinetis KE18 MCU Tower System Module
1. Plug It In
Let's take your TWR-KE18F for a test drive. You have the choice of watching the sequence in a short video or following the detailed actions list below.


2. Get Software
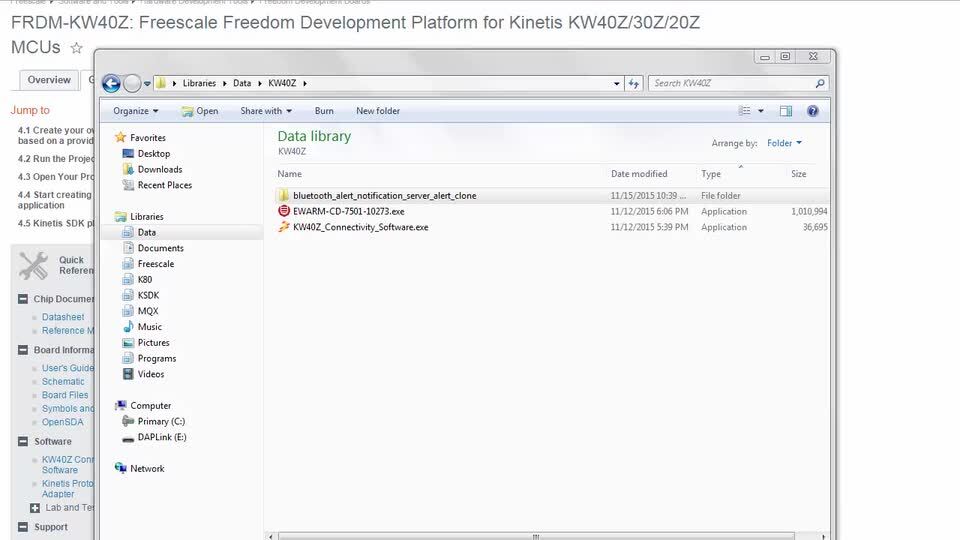
2.1 Installing software for the TWR-KE18F
2.2 Jump Start Your Design with the Kinetis SDK
The Kinetis Software Development Kit (SDK) is complimentary and includes full source code under a permissive open-source license for all hardware abstraction and peripheral driver software.
Click below to download the KE18 SDK package.
2.3 Install Your Toolchain
NXP offers a complimentary toolchain called Kinetis Design Studio (KDS)
Want to use a different toolchain?
No problem! The Kinetis SDK includes support for other tools such as IAR , Keil and Command-line GCC .

2.4 Tool Update
If using Kinetis Design Studio or Arm GCC tool chains, the latest Segger J-Link software tools need to be downloaded and installed. This update is required for those tools to support the KE1x family. Ensure you install this update after installing the IDE of your choice.
First, download the latest "Software and documentation pack" from J-Link / J-Trace Downloads .
Then Install the software and at the end of the installation, there will be a dialog box asking to update installed IDEs. Make sure the KDS 3.2.0 IDE is checked if using Kinetis Design Studio.
2.5 PC Configuration
Many of the example applications output data over the MCU UART so you'll want to make sure that the driver for the board's virtual COM port is installed. Before you run the driver installer, you MUST have the board plugged in to your PC.
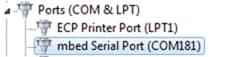
With the serial port driver installed, run your favorite terminal application to view the serial output from the MCU's UART. Configure the terminal to 115200 baud rate, 8 data bits, no parity and 1 stop bit. To determine the port number of the TWR-KE18F's virtual COM port, open the device manager and look under the "Ports" group.
Not sure how to use a terminal application? Try one of these tutorials:
Tera Term Tutorial, PuTTY Tutorial3. Build, Run
3.1 Build and Run SDK Demos on the TWR-KE18F
3.2 Explore the SDK Example Code
The Kinetis SDK comes with a long list of demo applications and driver examples. To see what's available, browse to
the SDK boards folder of your SDK installation and select your board, the
TWR-KE18F <sdk_install_directory>/boards/twrke18f</sdk_install_directory>
To learn more about demo applications or driver examples, open the Kinetis SDK v.2.0 API Reference Manual, located
in
<sdk_install_directory>/docs.</sdk_install_directory>
3.3 Build, Run and Debug SDK Examples
Use Kinetis Design Studio
Running a demo using Kinetis Design Studio IDE Download PDF
1. Install KDS Updates
Before using KDS IDE with KSDK, it is recommended that you make sure that your tools are up-to-date. The steps discussed below are shown using the Windows version of KDS, but are identical for Mac and Linux users.
-
Select "Help"→ "Check for Updates"

-
Install all updates from Freescale/NXP – these are denoted by "com.NXP.xxx" or "com.nxp.xxx". There may also be updates for things such as toolchain or debug interfaces. While these additional updates are typically OK to install, sometimes they may cause issues since they aren’t released as part of the KDS toolchain
2. Build an Example Application
The following steps will guide you through opening the hello_world application. These steps may change slightly for other example applications as some of these applications may have additional layers of folders in their path.
-
Select File→ Import from the KDS IDE menu. In the window that appears, expand the "Project of Projects" folder and select "Existing Project Sets". Then, click the "Next" button

-
Click the "Browse" button next to the "Import from file:" option

-
Point to the example application project, which can be found using this path:
<install_dir>/boards/<board_name>/<example_type>/<application_name>/kds </application_name> </example_type> </board_name> </install_dir>For this guide, choose the specific location:
<install_dir>/boards/twrke18f/demo_apps/hello_world/kds</install_dir> -
After pointing to the correct directory, your "Import Working Sets and Projects" window should look like the figure below. Click the "Finish" button

-
There are two project configurations (build targets) supported for each KSDK project:
- Debug – Compiler optimization is set to low, and debug information is generated for the executable. This target should be selected for development and debug
- Release – Compiler optimization is set to high, and debug information is not generated. This target should be selected for final application deployment
-
Choose the appropriate build target, "Debug" or "Release", by clicking the downward facing arrow next to the hammer icon, as shown below. For this example, select the "Debug" target

-
The library starts building after the build target is selected. To rebuild the library in the future, click the hammer icon (assuming the same build target is chosen)
3. Run an Example Application
The TWR-KE18F board comes loaded with the mbed/CMSIS-DAP debug interface from the factory. If you have changed the debug OpenSDA application on your board, visit OpenSDA Serial and Debug Adapter for information on updating or restoring your board to the factory state.
-
Connect the development platform to your PC via USB cable between the "SDAUSB" USB port on the board andthe PC USB connector
-
Open the terminal application on the PC (such as PuTTY or TeraTerm) and connect to the debug COM port you determined earlier. Configure the terminal with these settings:
- 15200 baud rate
- No parity
- 8 data bits
- 1 stop bit
-
For Linux OS users only, run the following commands in your terminal. These install libudev onto your system, which is required by KDS IDE to launch the debugger
user@ubuntu:~$ sudo apt-get install libudev-dev libudev1user@ubuntu:~$ sudo ln –s /usr/lib/x86_64-linux-gnu/libudev.so /usr/lib/x86_64-linux-gnu/libudev.so.0 -
Ensure that the debugger configuration is correct for the target you're attempting to connect to. This refers to the OpenSDA interface of your board. If you’re unsure what your board has, please consult Appendix B of the PDF linked in the top right hand corner of this dialog
-
To check the available debugger configurations, click the small downward arrow next to the green "Debug" button and select "Debug Configurations"
-
In the Debug Configurations dialog box, select debug configuration that corresponds to the hardware platform you’re using. For Windows or Linux users, select is the mbed/CMSIS-DAP option under OpenOCD For Mac users, select J-Link
After selecting the debugger interface, click the "Debug" button to launch the debugger.


-
-
The application is downloaded to the target and automatically run to main():

-
Start the application by clicking the "Resume" button:

-
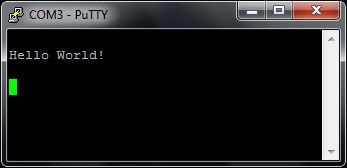
The hello_world application is now running and a banner is displayed on the terminal. If this is not the case, check your terminal settings and connections

3.4 Using a different toolchain?
Running a demo using IAR
1. Build an Example Application
The following steps will guide you through opening the hello_world application. These steps may change slightly for other example applications as some of these applications may have additional layers of folders in their path.
-
If not already done, open the desired example application workspace. Most example application workspace files can be located using the following path:
<install_dir>/boards/<sdk_board_name>/<example_type>/<application_name>/iar</application_name> </example_type> </sdk_board_name> </install_dir>Using the hello_world demo as an example, the path is:
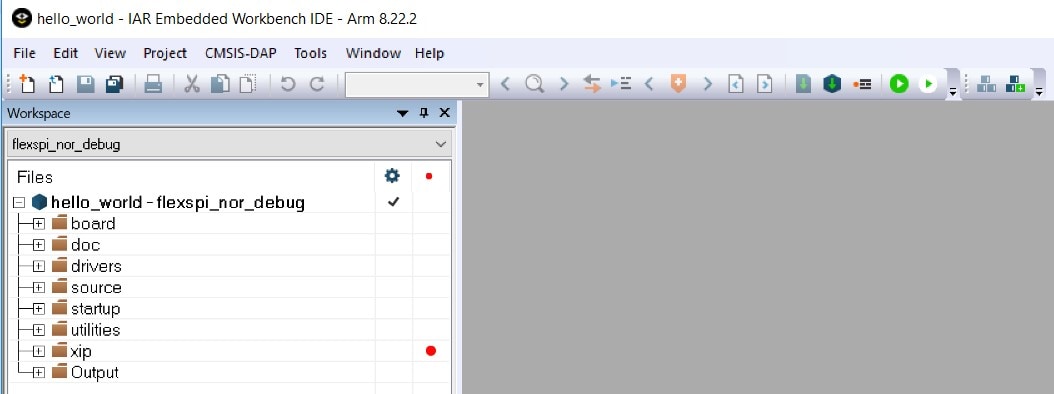
<install_dir>/boards/twrke18f/demo_apps/hello_world/iar</install_dir> -
Select the desired build target from the drop-down. For this example, select the “hello_world – Debug” target

-
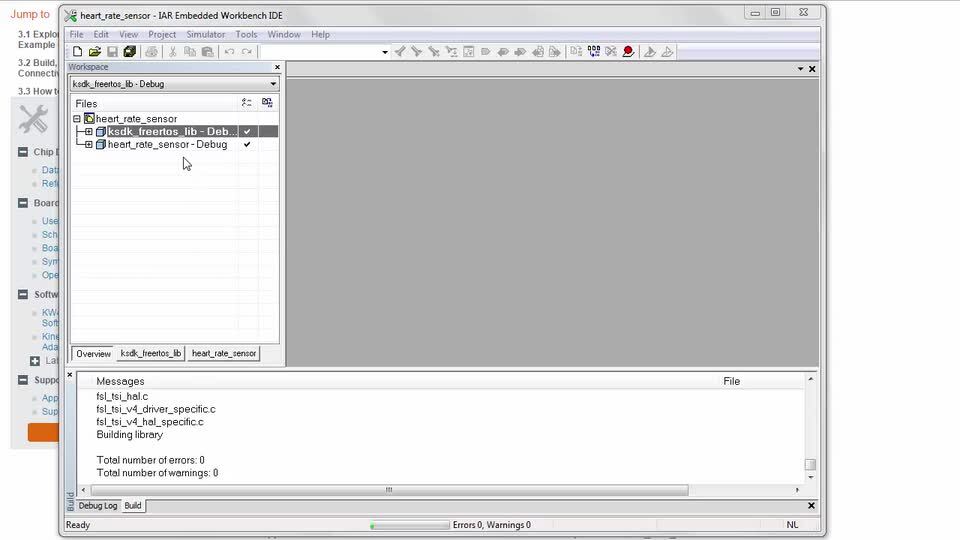
To build the application, click the “Make” button, highlighted in red below
-
The build will complete without errors:
2. Run an Example Application
The TWR-KE18F board comes loaded with the mbed/CMSIS-DAP debug interface from the factory. If you have changed the debug OpenSDA application on your board, visit OpenSDA Serial and Debug Adapter for information on updating or restoring your board to the factory state.
-
Connect the development platform to your PC via USB cable between the "SDAUSB" USB port on the board and the PC USB connector
-
Open the terminal application on the PC (such as PuTTY or TeraTerm) and connect to the debug COM port you determined earlier. Configure the terminal with these settings:
- 15200 baud rate
- No parity
- 8 data bits
- 1 stop bit
-
Click the "Download and Debug" button to download the application to the target

-
The application is then downloaded to the target and automatically runs to the main() function

-
Run the code by clicking the "Go" button to start the application

-
The hello_world application is now running and a banner is displayed on the terminal. If this is not the case, check your terminal settings and connections
Use Keil MKD
Running a demo using Keil® MDK/µVision® Download PDF
1. Install CMSIS device pack
After the MDK tools are installed, Cortex® Microcontroller Software Interface Standard (CMSIS) device packs must be installed to fully support the device from a debug perspective. These packs include things such as memory map information, register definitions and flash programming algorithms. Follow these steps to install the appropriate CMSIS pack.
-
Open the MDK IDE, which is called µVision. In the IDE, select the "Pack Installer" icon

-
In the Pack Installer window, navigate to the section with the Kinetis packs (they are in alphabetical order). The Kinetis packs start with "Keil::Kinetis" and are followed by the MCU family name, for example "Keil::Kinetis_K60_DFP". Because this example uses the TWR-KE18F platform, the K60 family pack is selected. Click on the "Install" button next to the pack. This process requires an internet connection to successfully complete

-
After the installation finishes, close the Pack Installer window and return to the µVision IDE
2. Build the Example Application
The following steps will guide you through opening the hello_world application. These steps may change slightly for other example applications as some of these applications may have additional layers of folders in their path.
-
If not already done, open the desired demo application workspace in:
<install_dir>/boards/<sdk_board_name>/<example_type>/<application_name>/mdk</application_name> </example_type> </sdk_board_name> </install_dir>The workspace file is named
<application_name>.uvmpw, so for this specific example, the actual path is:</application_name><install_dir>/boards/twrke18f/demo_apps/hello_world/iar/hello_world.uvmpw</install_dir> -
To build the demo project, select the "Rebuild" button, highlighted in red

-
The build will complete without errors
3. Run an Example Application
The TWR-KE18F board comes loaded with the mbed/CMSIS-DAP debug interface from the factory. If you have changed the debug OpenSDA application on your board, visit OpenSDA Serial and Debug Adapter for information on updating or restoring your board to the factory state.
-
Connect the development platform to your PC via USB cable between the "SDAUSB" USB port on the board and the PC USB connector
-
Open the terminal application on the PC (such as PuTTY or TeraTerm) and connect to the debug COM port you determined earlier. Configure the terminal with these settings:
- 15200 baud rate
- No parity
- 8 data bits
- 1 stop bit
-
After the application is properly built, click the "Download" button to download the application to the target

-
After clicking the "Download" button, the application downloads to the target and should be running. To debug the application, click the "Start/Stop Debug Session" button, highlighted in red

-
Run the code by clicking the "Run" button to start the application

-
The hello_world application is now running and a banner is displayed on the terminal. If this is not the case, check your terminal settings and connections
Use Arm® GCC
Running a demo using Arm ® GCC Download PDF
Set Up Toolchain
This section contains the steps to install the necessary components required to build and run a KSDK demo application with the Arm GCC toolchain, as supported by the Kinetis SDK. There are many ways to use Arm GCC tools, but this example focuses on a Windows environment. Though not discussed here, GCC tools can also be used with both Linux OS and Mac OSX.
Install GCC Arm Embedded Toolchain
Download and run the installer from GNU Arm Embedded Toolchain . This is the actual toolchain (i.e., compiler, linker, etc.). The GCC toolchain should correspond to the latest supported version, as described in the Kinetis SDK Release Notes.
Install MinGW
The Minimalist GNU for Windows (MinGW) development tools provide a set of tools that are not dependent on third party C-Runtime DLLs (such as Cygwin). The build environment used by the KSDK does not utilize the MinGW build tools, but does leverage the base install of both MinGW and MSYS. MSYS provides a basic shell with a Unix-like interface and tools.
-
Download the latest MinGW mingw-get-setup installer from MinGW - Minimalist GNU for Windows Files
-
Run the installer. The recommended installation path is
C:\MinGW, however, you may install to any location -
Ensure that the "mingw32-base" and "msys-base" are selected under Basic Setup

-
Click "Apply Changes" in the "Installation" menu and follow the remaining instructions to complete the installation
-
Add the appropriate item to the Windows operating system Path environment variable. It can be found under Control Panel → System and Security → System → Advanced System Settings in the "Environment Variables..." section. The path is:
<mingw_install_dir>\bin</mingw_install_dir>Assuming the default installation path, C:\MinGW, an example is shown below. If the path is not set correctly, the toolchain does not work.

-
Download CMake 3.0.x from Get the Software
-
Install CMake, ensuring that the option "Add CMake to system PATH" is selected when installing. It's up to the user to select whether it's installed into the PATH for all users or just the current user. In this example, the assumption is that it's installed for all users

-
Follow the remaining instructions of the installer
-
You may need to reboot your system for the PATH changes to take effect
Add a New Environment Variable for ARMGCC_DIR
Create a new system environment variable and name it ARMGCC_DIR. The value of this variable should point to the Arm GCC Embedded tool chain installation path, which, for this example, is:
C:\Program Files (x86)\GNU Tools Arm Embedded\4.9 2015q3
Reference the installation folder of the GNU Arm GCC Embedded tools for the exact path name of your installation.

Install CMake
4. Build an Example Application
To build an example application, follow these steps.
-
1. If not already running, open a GCC Arm Embedded tool chain command window. To launch the window, from the Windows operating system Start menu, go to “Programs → GNU Tools Arm Embedded
” and select “GCC Command Prompt” 
-
Change the directory to the example application project directory, which has a path like this:
<install_dir>/boards/<board_name>/<example_type>/<application_name>/armgcc</application_name> </example_type> </board_name> </install_dir>For this guide, the exact path is:
<install_dir>/boards/twrke18f/demo_apps/hello_world/armgcc</install_dir> -
Type “build_debug.bat” on the command line or double click on the "build_debug.bat" file in Windows operating system Explorer to perform the build. The output is shown in this figure:

5. Run an Example Application
The GCC tools require a J-Link debug interface. To update the OpenSDA firmware on your board to the latest J-Link app, visit OpenSDA Serial and Debug Adapter. After installing the J-Link OpenSDA application, download the J-Link driver and software package from SEGGER Downloads .
-
Connect the development platform to your PC via USB cable between the "SDAUSB" USB port on the board and the PC USB connector
-
Open the terminal application on the PC (such as PuTTY or TeraTerm) and connect to the debug COM port you determined earlier. Configure the terminal with these settings:
- 15200 baud rate
- No parity
- 8 data bits
- 1 stop bit
-
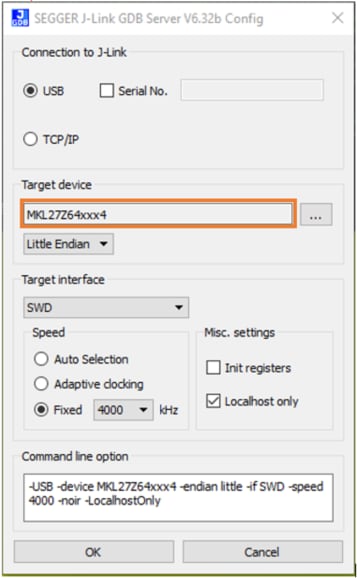
Open the J-Link GDB Server application. Assuming the J-Link software is installed, the application can be launched by going to the Windows operating system Start menu and selecting "Programs → SEGGER → J-Link
J-Link GDB Server" -
Modify the settings as shown below. The target device selection chosen for this example is the “MK64FN1M0xxx12” and use the SWD interface

-
After it is connected, the screen should resemble this figure:

-
If not already running, open a GCC Arm Embedded tool chain command window. To launch the window, from the Windows operating system Start menu, go to "Programs → GNU Tools Arm Embedded
" and select "GCC Command Prompt" 
-
Change to the directory that contains the demo application output. The output can be found in using one of these paths, depending on the build target selected:
<install_dir>/boards/<board_name>/<example_type>/<application_name>/armgcc/debug</application_name> </example_type> </board_name> </install_dir><install_dir>/boards/<board_name>/<example_type>/<application_name>/armgcc/release </application_name> </example_type> </board_name> </install_dir>For this guide, the path is:
<install_dir>/boards/twrke18f/demo_apps/hello_world/armgcc/debug</install_dir> -
Run the command "arm-none-eabi-gdb.exe
.elf". For this example, it is "arm-none-eabi-gdb.exe hello_world.elf" 
-
Run these commands:
- "target remote localhost:2331"
- "monitor reset"
- "monitor halt"
- "load"
- "monitor reset"
-
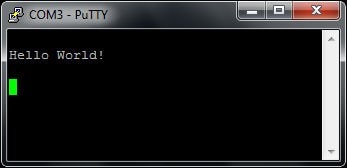
The application is now downloaded and halted at the reset vector. Execute the "monitor go" command to start the example application
The hello_world application is now running and a banner is displayed in the terminal window.

4. Create
NXP provides a project cloner tool which allows you to copy an existing demo to use as a base for your own development, keeping the original demo app resources for reference. Click on the link below to get the project generator tool.
Create an Application for the TWR-KE18F
4.1 Get SDK Project Generator
Let's create our own project and make a simple SDK-based application. NXP provides an intuitive, simple project generation utility that allows creation of custom projects based on the Kinetis SDK.
4.2 Run the SDK Project Generator
After extracting the ZIP file, open the utility by clicking on the KSDK_Project_Generator executable for your computer's operating system. Point the tool to your SDK installation path, name your project, and select the board that it uses as a reference. Click on the Quick Generate button to finish.

4.3 Open Your Project
Your new project will be located in
<sdk_install_directory>/boards/towerke18f/user_apps/myProject/kds. Open the project in your toolchain of choice by using the same process described in section 3.2.
4.4 Write Some Code
Now, let's make our new project do something other than spin in an infinite loop. The SDK examples provide a board support package (BSP) to do various things specific to the board, including macros and definitions for items such as LEDs, switches and peripheral instances. To keep things simple, lets make the LED blink using the BSP macros.
Update the main() function in your project's main.c file with the following code:
12345678910111213141516171819volatile int delay;
// Configure board specific pin muxing
BOARD_InitPins();
// Configure clock source
BOARD_BootClockRUN();
// Initialize the UART terminal
BOARD_InitDebugConsole();
PRINTF("\r\nRunning the myProject project.\n");
// Enable GPIO port for the red LED
CLOCK_EnableClock(kCLOCK_PortE);
PORT_SetPinMux(BOARD_LED_RED_GPIO_PORT, BOARD_LED_RED_GPIO_PIN, kPORT_MuxAsGpio);
LED_RED_INIT(LOGIC_LED_OFF);
for (;;)
{
LED_RED_TOGGLE();
delay = 5000000;
while(delay--);
}
Tera Term Tutorial
Tera Term Tutorial
Tera Term is a very popular open source terminal emulation application. This program can be used to display information sent from your NXP development platform's virtual serial port.
- Download Tera Term from SourceForge. After the download, run the installer and then return to this webpage to continue
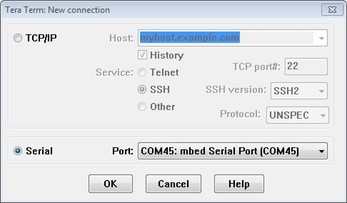
- Launch Tera Term. The first time it launches, it will show you the following dialog. Select the serial option. Assuming your board is plugged in, there should be a COM port automatically populated in the list
- Configure the serial port settings (using the COM port number identified earlier) to 115200 baud rate, 8 data bits, no parity and 1 stop bit. To do this, go to Setup → Serial Port and change the settings
- Verify that the connection is open. If connected, Tera Term will show something like below in it's title bar

You're ready to go
PuTTY Tutorial
Putty Tutorial
PuTTY is a popular terminal emulation application. This program can be used to display information sent from your NXP development platform's virtual serial port.
- Download PuTTY using the button below. After the download, run the installer and then return to this webpage to continue
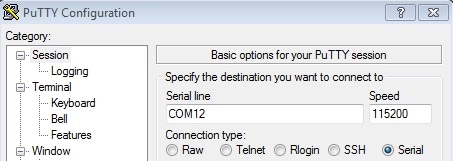
- Launch PuTTY by either double clicking on the *.exe file you downloaded or from the Start menu, depending on the type of download you selected
- Configure In the window that launches, select the Serial radio button and enter the COM port number that you determined earlier. Also enter the baud rate, in this case 115200
- Click Open to open the serial connection. Assuming the board is connected and you entered the correct COM port, the terminal window will open. If the configuration is not correct, PuTTY will alert you
You're ready to go.
Support
Forums
Connect with other engineers and get expert advice on designing with the BOARD-ID evaluation board using our community sites.
On this page
- 2.1
Installing software for the TWR-KE18F
- 2.2
Jump Start Your Design with the Kinetis SDK
- 2.3
Install Your Toolchain
- 2.4
Tool Update
- 2.5
PC Configuration
- 3.1
Build and Run SDK Demos on the TWR-KE18F
- 3.2
Explore the SDK Example Code
- 3.3
Build, Run and Debug SDK Examples
- 3.4
Using a different toolchain?