We are well into the era of Industry 4.0 with more and more technologies being
adopted for industrial automation. Some newer technologies are enabling AI and
machine learning, data analytics, industrial networking, cyber security and
functional safety. However, the bulk of industrial automation that sits in the
middle of all the other technologies still relies on robot and motion control.
From time to time, motion control is mentioned with motor control and there is
some confusion about these two terms. What is the difference between these two
concepts and how do we apply the right solution to either or both of them in
industrial automation? Read on for a summary of the differences between motion
control and motor control and how to make them work together.
What Is Motion Control?
Motion control is a sub-system of an industry automation system. It
synchronizes and controls multiple motors to complete a sequence of movements.
For example, a multi-axis robotic arm requires a number of motors to operate
together seamlessly to make a specific move.
Motion control
is used mainly for trajectory planning, speed planning, interpolation
algorithm and kinematics conversion. Motion control systems are often seen in
printing, packaging and assembly applications.
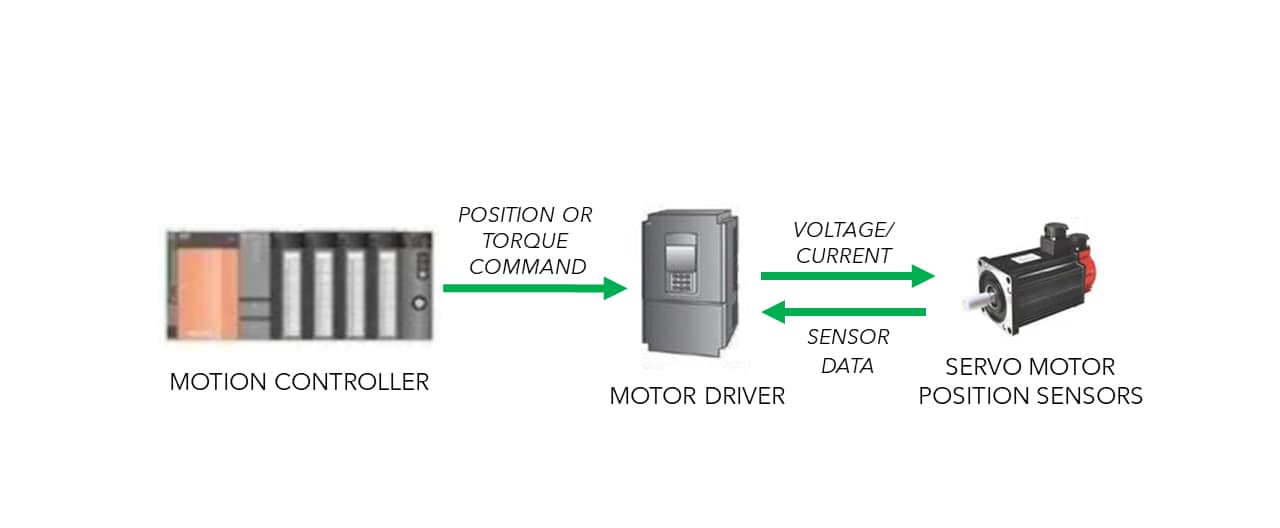
As shown below, a motion control system typically consists of these major
components:
-
A motion controller that generates trajectory planning and then provides
control commands to motor drivers
-
Motor drivers that convert the control commands from the motion controller
(usually a speed or torque signal) into a higher power voltage or current
signal to drive the motors
- Motors that execute movement according to control commands
-
Position sensors that provide the position/speed data of the motor rotor to
the position/speed controller to achieve the precision position/speed
control
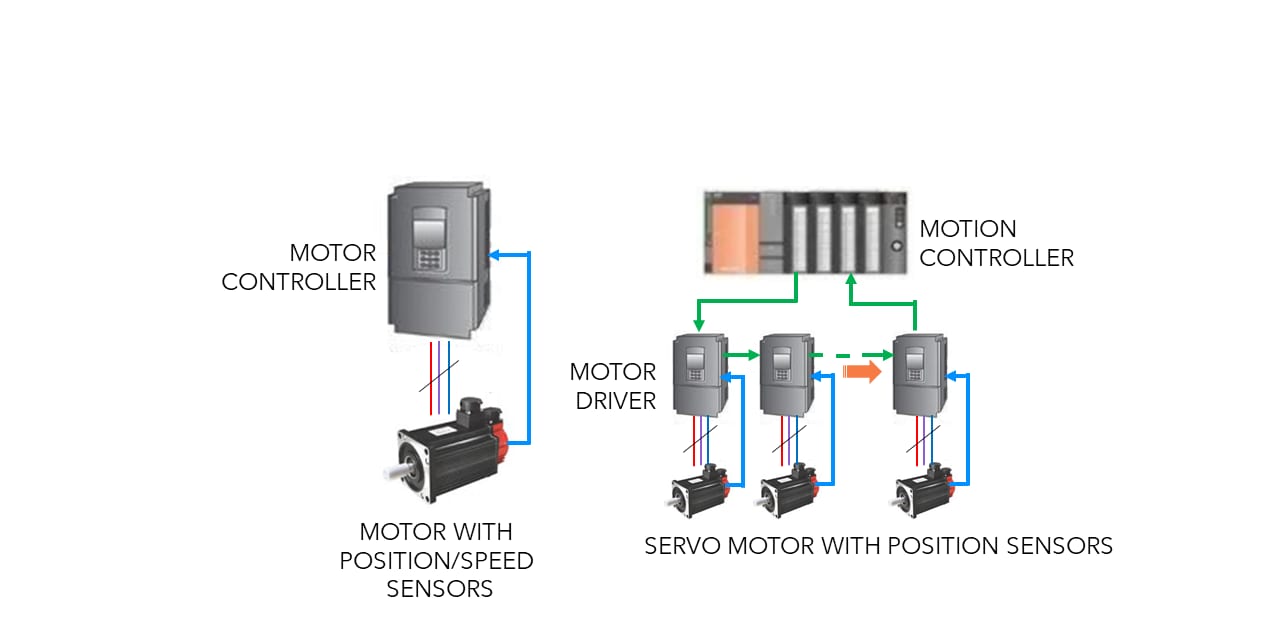
 The function of the motion controller in system is to synchronize and
control multiple motors to complete a sequence of movements.
The function of the motion controller in system is to synchronize and
control multiple motors to complete a sequence of movements.
Designing for next-generation smart, connected and secure industrial
drives just got easier.
Get more insight by reading another insightful
blog.
Motor Control vs. Motion Control
Motor control, on the other hand, is a system or a technique that is more dedicated to
controlling the spinning of the motor. A typical motor control system adjusts
one or more of the parameters of the torque, speed and position of an
individual motor to reach the target values. Depending on the type of the
motor, the requirements and techniques to drive it can vary greatly. A motor
controller usually has no planning ability—the advanced drivers have simple
position and speed planning abilities. Therefore, a simple way to explain the
difference between motor control and motion control is:
-
Motor control is a part of the motion control system (usually a current
loop, working in torque control mode)
-
However, sometimes it can be confusing because the position loop/speed
loop/torque loop of motor control can be implemented either in the motor
controller or in the motion controller.
 The interaction between motion controllers and motor controllers in a
system.
The interaction between motion controllers and motor controllers in a
system.
Now that we know the differences between the two systems, it becomes clear
that the design requirements or resources for them are quite different as
well.
Motor control is highly focused on making the motor spin properly, or rather,
focused on communication. In order to do that, the motor controller needs to
interface with a variety of sensors, process both analog and digital signals,
as well as generate waveforms to drive the motor. These all happen in a very
short loop of time that can range from 50us to 300us.
NXP offers the silicon to enable secure, connected and high-efficiency
motor control for industrial applications.
Motion control, however, often acts as a system supervisor that requires
communication in between multiple motor controllers, other sources such as
data via Ethernet (EtherCAT and TSN.), CAN, RS485 and commands from a
human-machine interface (HMI) panel. As mentioned, a motion controller may
also take part in some of the motor control tasks such as controlling the
speed loop, the position loop or even the torque loop. Therefore, the
real-time control loop of a motion controller can vary from 100us all the way
to hundreds of milliseconds, depending on what actual tasks the motion
controller is taking part in.
Designing a Motion Control System
A motion control system can be a fairly complex design that covers a lot of
aspects such as motor control, industrial networking, HMI, encoder/decoder,
security and safety. Thus, it requires multiple control units to coordinate
with each other in the system.
This is where you need a full suite of devices for the motion control
designers to choose from—and that’s where NXP and its wide portfolio of
microcontrollers (MCU) and microprocessors (MPU) comes in.
For the motor controller, NXP’s
Kinetis V MCUs,
Kinetis E MCUs,
LPC MCUs
and
digital signal controllers (DSCs)
offer options from controlling a simple motor with an Arm®
Cortex®-M0+ core, to running FOC algorithms on dual motors with
a Cortex-M33 core or a highly efficient DSC core. With the popular flashless
i.MX RT crossover MCUs, more motors can be controlled precisely at the same
time. Not only do these MCUs have a wide range of processing capabilities to
choose from, they are also integrated with the peripherals that are
well-suited for motor control, such as high-speed and high-resolution ADCs,
high-speed comparators, flexible motor control timers and PWMs and DSP
accelerator. Safety features such as fault detection and auto-shutdown can
work together seamlessly with the industrial safety compliances offered by
these devices.
What’s the best MCU for your motor control design?
Explore our comprehensive
motor control guide
for the latest solutions.
For the motion controller, NXP offers both the
i.MX RT crossover MCUs
and the MPU product lines, including the
Layerscape
and the
i.MX series processors. Those devices support a rich integration of industrial communication
interfaces such as Ethernet/IP, Profinet, EtherCAT and TSN. The multiple-core
architecture generates enough horsepower for communication protocols, motion
profile planning and real-time loops control. They are also equipped with
advanced timers to support the multiple modes counting and flexible pulse
train outputs.
 A motion control system can use a wide range of MCUs and MPUs to enable
multiple motor drivers that facilitate synchronized movements across a
single robotic arm, for example.
A motion control system can use a wide range of MCUs and MPUs to enable
multiple motor drivers that facilitate synchronized movements across a
single robotic arm, for example.
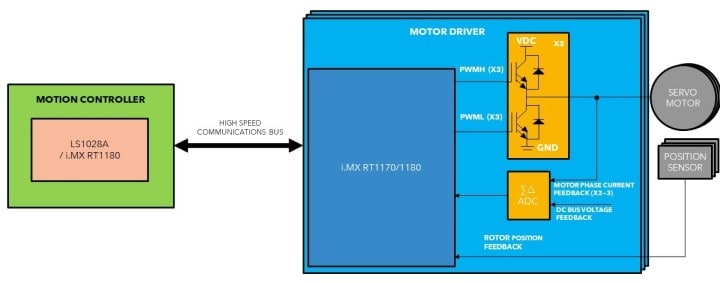
To accelerate the time to market of the motion control system, a quick and
easy way for proof-of-concept and prototyping is keen. Therefore, NXP has been
developing reference design platforms that provide rich features in industrial
motion control and meet industrial automation standards. We recently announced
the
i.MX RT industrial drive development platform, which is based on the i.MX RT crossover MCU and features multi-motor
control, deterministic communications and a foundation for IEC 62443 security
compliance. Available today, the
quad motor control development platform
implements a full set of NXP products including the i.MX RT crossover MCU and
EdgeLock® SE050 secure element. These devices work together to demonstrate the features needed for an
industrial motor control system, such as power management, driving four
motors, industrial communication interfaces, HMI touch panel interface and
security integration.
In summary, we have covered the definition of motion control, the difference
between motor control and motion control, as well as the trends in the
industry for motion control system design requirements. Keep following NXP for
more
motor control solutions.