Why do we talk about radar systems at all? Every year, about 1.3 million
people die on the world’s roads, and millions more are severely injured. The adoption
of advanced driver-assistance systems
(ADAS)
with radar technology are crucial to
safer driving, avoiding accidents and saving lives.
Radar adoption is significantly accelerating by mandates across regions and
regional New Car Assessment Program (NCAP) ratings. Many regions, for example,
have issued legislation or five-star safety ratings for making certain
features mandatory, such as automatic emergency braking, blind-spot detection
or vulnerable road user detection.
 Figure 1: Levels of ADAS and autonomous driving
Figure 1: Levels of ADAS and autonomous driving
The society of automobile engineers (SAE) defines six levels of driving
automation, where L0 is no automation, and, step-by-step, ADAS is evolving to
driver assistance, partial automation, conditional automation, and eventually
up to fully autonomous L5 vehicles. These directives are driving ADAS adoption
and to higher levels of automation.
The L2 to L3 Leap
While the automotive OEMs navigate the many design complexities required to
achieve L3 conformance, where the vehicle OEM assumes the accident liability,
not the driver, attention has turned to and is driving a transitional level.
In regards to sensor technology, there is a significant difference in the leap
from L2 to L3. L2+ provides the L3 like capabilities but with the driver
available as a backup, reducing the additional need for redundancy.
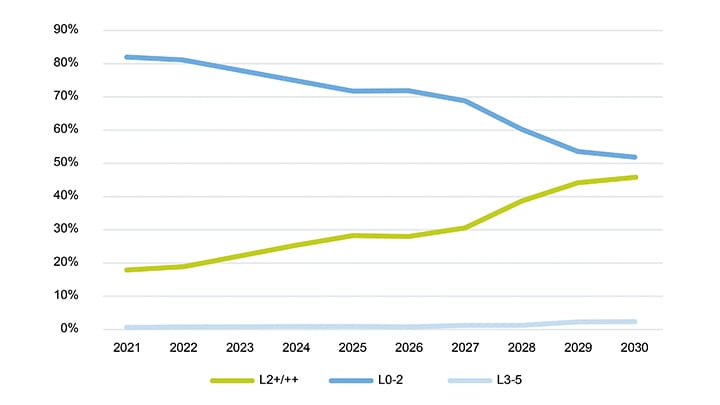 Figure 2: Forecast market shift from L2+ to autonomous driving (2021 – 2030)
Figure 2: Forecast market shift from L2+ to autonomous driving (2021 – 2030)
A recent Yole Development report indicates that the uptake for L2+ vehicles is
likely to grow steadily as L0 – L2 vehicles begin to subside, achieving almost
50% market share by 2030. L2+ also allows OEMs to gradually roll out advanced
safety and comfort features, allowing more time for sensor technologies to
mature. The driver continues to provide redundancy in the interim, and the
OEMs can optimize the balance between features and costs and gradually
introduce L3 ‘light’ vehicles.
Sensor Technology—No Single Solution
Three primary sensor technologies enable ADAS and autonomous driving – radar,
camera, and light detection and ranging (LiDAR). Each has its unique strengths
and weaknesses, and ultimately, there is no prevailing sensor technology
solution.
Radar and camera sensors are largely complementary technologies and are widely
deployed in L1 and L2 vehicles, owing to their maturity and affordability.
Radars, for example, are excellent at measuring speed, distance, but cannot
capture color information. The resolution of angle-of-arrive measured by
conventional radars is notably lower than what can be derived from camera and
LiDAR sensors. In contrast, cameras are best for pattern and colour detection,
but might struggle with environmental effects. It can, for example, be blinded
by bright light, not see at night or struggle with fog or snow. On the other
hand, radar sensors work very robustly and reliably on bright sunny days and
at night and in almost all weather conditions.
LiDAR’s primary differentiating features are its ultra-precise angular
resolution, both horizontally and vertically, and its fine resolution at
range. These strengths make it well-suited for high-resolution 3D environment
mapping, giving it the ability to detect free spaces, boundaries and
localization accurately. However, it shares some common weaknesses with camera
sensors, having susceptibility to harsh weather or road conditions. Yet the
biggest hurdle for mass adoption in mainstream passenger L2+ and L3 vehicles
is its cost. Here, the advent of 4D imaging radar with its significantly
enhanced fine resolution over conventional radar is proving a compelling
alternative to LiDAR.
Imaging Radar Evolution
In the early days, radar technology was mainly used for seeing other cars.
Essentially, these were 2D-capable sensors that measured speed and distance.
However, today’s state-of-the-art radar technologies are essentially 4D
capable sensors. In addition to measuring speed and range, 4D sensors measure
horizontal and vertical angles. This capability allows the vehicle to see cars
and, more importantly, pedestrians, bicycles and smaller objects.
 Figure 3: Imaging radar can differentiate between cars, pedestrians and
other objects.
Figure 3: Imaging radar can differentiate between cars, pedestrians and
other objects.
At the bottom end (L2+), the focus is on having a 360-degree cocoon around the
vehicle (the industry buzzword for this is 'corner radar'). As the name
suggests, there are at least four, but often six or seven fine resolution
radar sensor nodes as there might be additional ‘gap filler’ radars to the
side. Seeing a child standing between two parked cars in low-light conditions
becomes possible for urban autopilot. At the high-end, L4 and above, vehicles
can see smaller objects and go into higher resolution, using imaging radar for
full environmental mapping around the vehicle and looking in the far distance
ahead or behind to avoid a hazard by detecting it and taking proper actions
well in advance. Distances reaching 300 meters, or even beyond, are possible
in the future. Highway autopilot will be able to detect and react to a
motorcycle traveling alongside a truck approaching with high speed from
behind.
The Future of Imaging Radar
Key technology ingredients that have enabled this evolution in imaging radar
were the migration from 24 to 77GHz, technologies like gallium arsenide (GaAs)
or silicon germanium (SiG) to standard plain RF CMOS. Other advancements
include going from low to high channel count advanced MIMO configurations and
from basic processing to high-performance processing with dedicated
accelerators and DSP cores, as well as advanced radar signal processing
techniques.
With all of these technologies combined, NXP has developed the
S32R45
radar processor that, together with the
TEF82xx RF-CMOS
radar transceivers, is capable of delivering imaging like point clouds with
moderate antenna count. This technology provides a clear, cost-effective
pathway for OEMs to deliver 4D imaging radar capabilities for L2+ and higher
commercial volumes and cost structure. Alongside are the essential
peripherals, such as safe power management and in-vehicle network components.
All of this together makes radar node and NXP is positioned to cover the
complete system.
For more in-depth information about imaging radar, take the imaging radar session in the Driving Automation and Radar Academy.
Also take a look at our 4D Imaging Radar live demonstration to watch our
technology at work




