- Smarter World Blog
- Evaluating Distributed Radar Architectures? Here Are 4 Reasons You Should
Evaluating Distributed Radar Architectures? Here Are 4 Reasons You Should

Automakers are exploring different radar implementations to enhance performance and system optimization for new Advanced Driver Assistance Systems (ADAS) architectures and ease the transition to software-defined vehicles (SDVs). Now there is a reference design – the NXP PurpleBox – to help with their development.
With the shift towards software-defined vehicles (SDVs), automakers need an easier way to maintain and update their software to extract the untapped performance of the latest radar sensors. At the same time, the growth in active safety measures has caused the number of radar sensors in cars to increase, adding cost and complexity. The diversification of ADAS architectures pounded this, propelling the need for solutions to address future requirements.
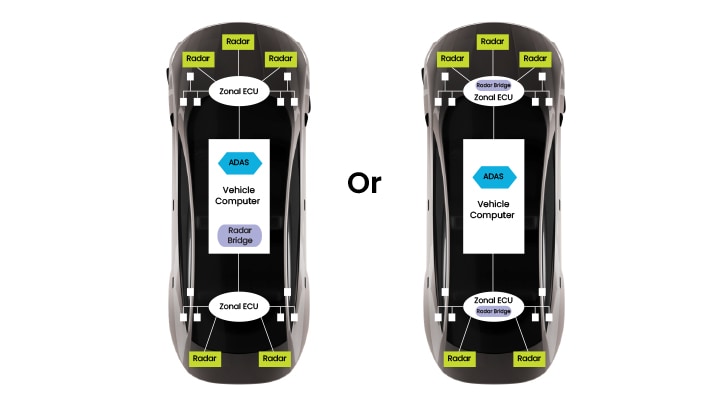
Edge radar with intelligent sensors at the edge, distributed radar with intelligence aggregated away from the edge in a co-processor and centralization with intelligence aggregated in a central compute system are all architectural choices that automakers are exploring. Of these, distributed radar architecture emerges as one of most promising. It fulfills the OEM objectives of advancing the radar architecture through early fusion of several radar sensors, which significantly enhances the performance, while offering a clear separation between camera and radar perception.
Get the most out of radar sensors. Explore ADAS architectures and radar processing in this white paper.
Advantages of an Optimized Radar Bridge
A radar bridge that aggregates data from multiple sensors provides optimized processing performance and fuses the sensor inputs which can offer several advantages. It creates a more maintainable system, because it allows for over-the-air updates in the radar bridge instead of updating each sensor individually. It also allows for the incorporation of state-of-the-art algorithms for advanced angle finding and makes localization possible, which is currently not implementable on edge radar systems due to limited processing capabilities of such systems. A radar bridge-based early fusion boosts the performance and offers an opportunity to extract more information from the radar sensors for a better ADAS experience. AL/ML could be leveraged on this platform for a major performance enhancement of the radar output in addition to improved early sensor fusion and better sensor resolution.
Radar bridge combined with appropriate software enables:
Efficient Signal Processing
A radar bridge takes in 1st FFT data from several radar sensors and produces a fused point cloud. Combining the data of multiple radars with an overlapping field of view has a great advantage. Perceiving a traffic scene from multiple angles will increase the detection accuracy, reducing the false positive and false negative detections and adding to the safety of the ADAS function.
Low Latency
Because the processing resources on the radar bridge do not need to be shared with other functions, this “monotasking” results in a low latency. The processed point cloud is immediately available, allowing the car to react instantly in safety-critical traffic situations.
Interference Management
A radar bridge can analyze the incoming data of all radar sensors simultaneously and detect where the signals are influenced by interference. The software on the bridge can allocate other frequencies or timeslots to the sensors where there is interference to enable the radar sensors to produce clean signals again. This helps avoid path and action planning based on incorrect information and contributes to the safety of the car and its traffic environment. The radar bridge can also reconstruct radar signals that are damaged due to interference with radar transmissions from other cars. This can be done by a machine learning model which runs on the neural network accelerator on the radar bridge.
Perpendicular Velocity
It is also possible to measure the perpendicular velocity component of detected objects with a radar bridge. Radars can instantaneously see the radial velocity of objects due to the Doppler effect. Combining the data from two radars enables the two radial velocity vectors at different angles to derive the perpendicular velocity. This instantaneous measurement of the true velocity per detection adds to the quality of the point cloud. This improves the performance of difficult safety traffic scenarios such as lane changes, cutting in and out on a highway or seeing crossing pedestrians.
Managing Radar Sensors
Radar and vision sensor technologies provide the necessary perception capabilities to enable ADAS and AD use cases. Radar with its all-weather capability, robustness against varying lighting conditions and its cheaper cost plays a pivotal role in every ADAS system. Extracting more information from radars would allow ADAS systems to significantly enhance the overall performance and experience compared to the solutions deployed today.
Distributed radar architecture, which enables zonal or central processing of sensor data, is an advanced way to manage sensor functions and fusion of sensors which is essential to extract the untapped performance of next generation radar sensors. Radar bridge as described above can process and fuse radar sensor data in a zonal or central compute platform which can be further fused with the vision perception data. This type of radar processor is versatile as it enables customers to either output point cloud or radar objects. Radar bridge can be co-located with the vision processor in the central ECU or with the zonal controller in the zonal ECU.
PurpleBox Reference Design
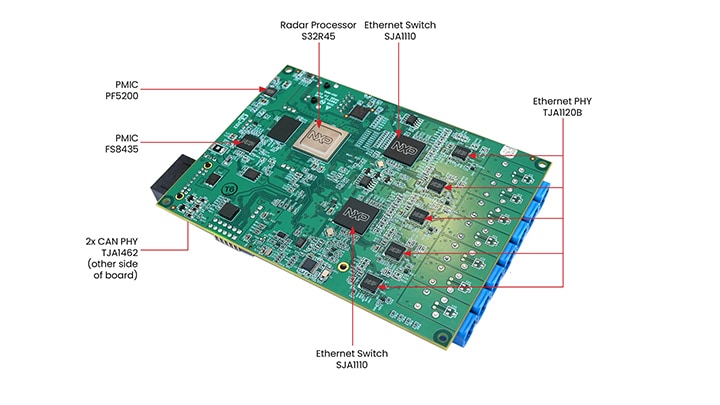
NXP has developed a reference design, the PurpleBox, which helps developers evaluate the distributed radar architecture concept and accelerate deployment of early radar fusion. This design offers an AI extension using 26TOPS machine learning accelerator from Hailo which unlocks new dimensions in the way radar data could be leveraged.

The PurpleBox can be used as a reference ECU and is a key component of a radar bridge proof-of-concept based on NXPs S32R45 radar processor. It can process the signals of four corner radar sensors, receiving compressed Range FFT data and producing a high-density surround point cloud. The PurpleBox comes with a comprehensive software development environment with pre-integration of drivers, OS, etc, including a demo application which allows customers to evaluate the platform and develop their own processing chain reusing the pre-integrated software. It also includes a M.2 PCIe interface which can be used to attach a mass storage device, or a Hailo-8 machine learning accelerator for advanced AI enhancement for radar perception.
PurpleBox is built on the proven S32 processor platform from NXP which allows customers to leverage software across several domains. PurpleBox builds on the recently announced NXP CoreRide platform. This platform integrates hardware and software to allow customers to focus on faster evaluation and application development for distributed radar architectures.
Take a Test Drive
NXP is helping enable the transition from fixed vehicle architectures to new ADAS architectures. Distributed radar architectures allow automakers to leverage information across a network of sensors, with each sensor delivering detailed, rich low-level sensor data to a co-processor enabling early radar fusion and enhanced radar perception processing. NXP’s next generation of radar processors is designed to enable these architectures while driving advanced safety and comfort features. For automakers and Tier 1 suppliers that want to explore the possibilities of a radar bridge, the NXP PurpleBox reference design is now available.
Authors

Karthik Ramesh
Karthik Ramesh is responsible for ADAS system solutions marketing, essential for next-generation automated driving. He is passionate about technology and has more than 15 years of automotive industry experience having worked for NXP and Bosch.

Kees Gehrels
Kees started his professional career in television systems at Philips in 1988, changing gears in 2007 to become Systems and Applications Manager within the NXP automotive business. He was one of the first to pioneer the NXP radar business back in 2012 and is still passionate about radar innovations and business development to help pave the way towards our vision of zero road accidents.

Andrew Robertson
Andrew Robertson brings a wealth of experience to his role as Director of Radar Customer Application Support. He joined Motorola/Freescale then NXP in 2002 and worked in multiple roles within Automotive Microcontrollers. His career began with a passion for radar technology, leading him to excel as a radar engineer. Leveraging his in-depth technical knowledge, he transitioned to leadership as a Radar Manager, fostering innovation and collaboration within his team. His focus is ensuring customer success, by drawing on his technical expertise and leadership skills, Andrew champions customer needs, ensuring they receive exceptional support for their radar development.