For mobile robots to achieve optimal performance, smooth motion and reliable operation, efficient and precise motor control is
essential. As robots become more autonomous and sophisticated, advanced microcontrollers that can handle the complexities of
motor control alongside other duties are in high demand. NXP's new MCX portfolio of microcontrollers feature cutting-edge
peripherals that enable developers to optimize motor control in mobile robotic systems.
FlexPWM Module
The MCX A and N series feature a versatile and highly configurable Enhanced Flex
Pulse-Width Modulator (eFlexPWM) module. This module enables precise motor control and offers a wide feature set to meet the
diverse needs of mobile robotics applications. In addition to advanced controls for driving motors, the eFlexPWM module can be
used to build Switched-Mode Power Supplies.
One of the eFlexPWM module's key capabilities is its support for center-aligned, edge-aligned and asymmetrical Pulse Width
Modulation (PWM).
Center-aligned PWMs maintain phase alignment and minimize current ripple in brushless DC (BLDC) motors, commonly used in mobile
robotics for their high efficiency and torque density. By employing center-aligned PWMs, developers can achieve smoother motor
operation, reduce electromagnetic interference (EMI) and extend the lifespan of the motor windings.
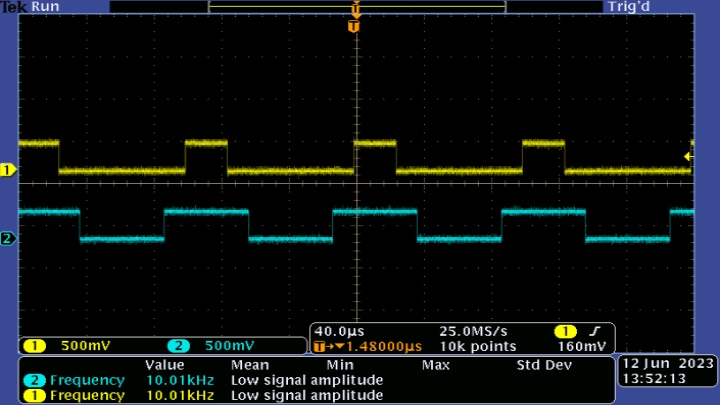 Center-aligned PWM signal
Center-aligned PWM signal
Edge-aligned PWMs simplify duty cycle calculations and make it easier to control H-bridge circuits, which are prevalent in
mobile robotics for bidirectional motor control, precise positioning and speed regulation. The FlexPWM module streamlines the
generation of the necessary control signals for H-bridge circuits, reducing software complexity and improving firmware
responsiveness.
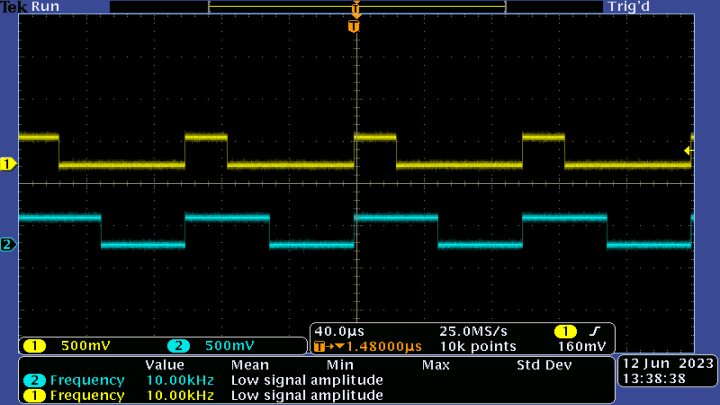 Edge-aligned PWM signal
Edge-aligned PWM signal
The FlexPWM module also offers phase-shifted PWMs, a valuable feature for mobile robotics applications involving multiphase
inverters. By phase-shifting the PWM signals, developers can optimize power delivery to multiple motors simultaneously, ensuring
smooth and coordinated motion in systems with multiple degrees of freedom, such as robotic arms or multiwheeled platforms.
The FlexPWM module incorporates robust fault protection and automatic fault-clearing mechanisms to ensure safety and
reliability. When a fault is detected, the module automatically disables the PWM outputs, preventing damage to the motor
windings and other sensitive components. Once the fault condition is resolved, the module can automatically clear the fault
status and resume normal operation, minimizing downtime and enhancing overall system robustness.
Learn more about the MCX N series features and peripherals. Dive deeper in this white paper.
Quadrature Decoder (QDC)
Mobile robotics require accurate position and speed feedback to implement effective closed-loop control systems. MCX
microcontrollers feature the Quadrature Decoder (QDC) module, a dedicated peripheral designed to simplify the process of
decoding quadrature encoder signals and providing reliable position and speed measurements.
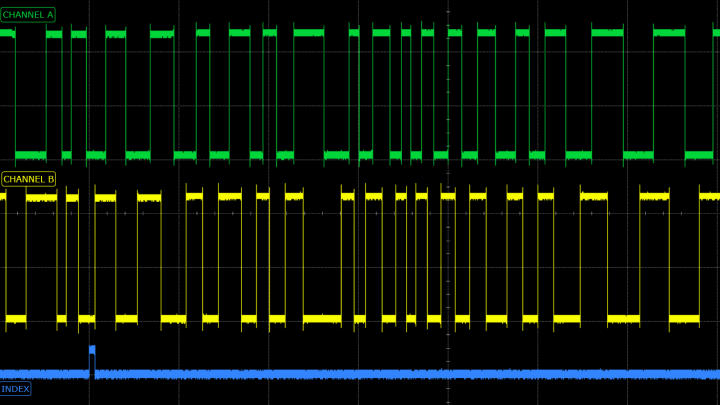 QEI
QEI
Quadrature encoders generate two quadrature signals, Phase A and Phase B, which are 90 degrees out of phase with each other. The
QDC module analyzes the sequence and frequency of these signals to determine both the motor shaft's position and direction of
rotation. The module's advanced features, such as glitch filtering and edge detection, ensure the integrity and reliability of
the decoded position and speed data, even in the presence of electrical noise or signal disturbances.
The QDC module offers flexibility in counter initialization, allowing developers to align the counter position with specific
events or conditions. For example, the counter can be initialized based on the occurrence of an index pulse generated by the
encoder once per revolution. This functionality simplifies the implementation of homing routines and absolute positioning.
Additionally, the QDC module supports initialization based on the assertion of a home signal triggered by an external sensor or
switch, enabling precise control and calibration of the mobile robotic system.
The QDC module provides multiple speed measurement methods for diverse application needs. Developers can calculate motor speed
by monitoring the change in position over a fixed time interval, balancing resolution and response time. Alternatively, the
module can measure the elapsed time between consecutive quadrature edges, offering high-resolution speed measurements suitable
for applications requiring rapid response and fine-grained control.
AND/OR INVERT (AOI) Module
The AND/OR INVERT (AOI) module in the MCX A series
complements the FlexPWM and QDC modules in optimizing motor control. It allows developers to create programmable combinational
boolean logic, generating event outputs based on specific input conditions. In the MCX N series
of microcontrollers, two AOI modules and a configurable flip-flop form the Event Generator (EVTG) module.
For motor control, the AOI module offers a powerful means to offload event detection and trigger generation from the main
processor, reducing firmware overhead and improving system responsiveness. By configuring the AOI module to monitor various
input signals, such as position, speed or fault status, developers can create custom hardware triggers that initiate specific
motor control actions without requiring constant software intervention.
For instance, the AOI module can be programmed to generate a trigger signal when a specific combination of conditions is met,
such as when the motor position reaches a predetermined threshold, and the speed is within a certain range. This trigger can
then be used to automatically adjust the PWM duty cycle, change the motor commutation sequence or perform any other desired
motor control action.
By leveraging the AOI module's programmable logic, developers can implement complex control strategies that respond quickly to
real-time events, enhancing overall performance and efficiency. The AOI module's flexibility allows for the creation of custom
triggering conditions tailored to the specific requirements of each application, enabling developers to optimize motor control
based on the unique characteristics of their robotic platform.
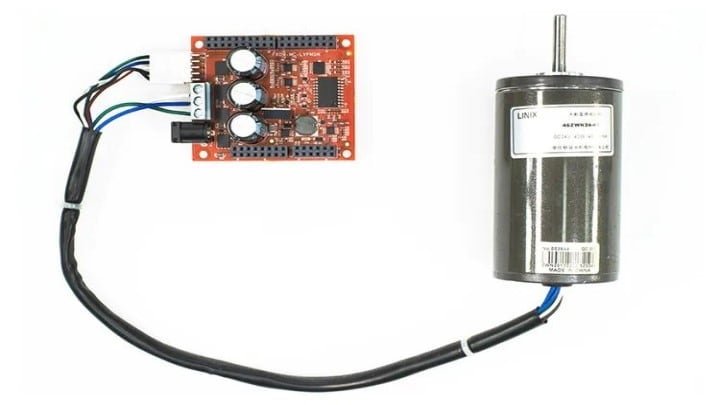 FRDM-MC-LVPMSM Expansion Board
FRDM-MC-LVPMSM Expansion Board
FRDM-MC-LVPMSM Expansion Board
NXP offers the FRDM-MC-LVPMSM expansion board to facilitate the development and prototyping of motor control applications. This
FRDM board combines hardware and software resources to accelerate the design process. It is designed with a shield form factor,
allowing it to integrate seamlessly with NXP's Freedom development board platform.
The FRDM-MC-LVPMSM expansion board
provides a complete motor control reference design when combined with NXP's Permanent Magnet Motor Control Reference Software. This software suite includes a range of preconfigured motor control algorithms, libraries and example projects, enabling
developers to quickly implement and optimize motor control systems for their specific mobile robotic applications.
The shield features a low-voltage, 3-phase permanent magnet synchronous motor (PMSM), commonly used in mobile robotics due to
its high efficiency, high torque density and precise control capabilities. The board also includes essential components such as
power stages, current sensing circuitry and encoder interfaces, providing a complete platform for motor control development.
By leveraging the FRDM-MC-LVPMSM shield and the associated reference software, developers can significantly reduce the time and
effort required to design and validate motor control systems for mobile robotics. The board's compatibility with the FRDM-MCX
development platform allows for seamless integration enabling developers to choose the most suitable microcontroller for their
specific application requirements.
MCUXpresso Developer Experience
For quick prototyping with MCX, NXP offers a low-cost FRDM development platform. FRDM development boards come with standard form factor and headers, easy access to MCU I/Os, on-board MCU-Link debugger and a
USB-C cable.
NXP’s GitHub also provides access to application examples, which can be accessed using the
Application Code Hub portal (ACH). MCUXpresso IDE and MCUXpresso for VS Code have ACH browsing built-in, so developers can easily search for available demos
and examples, and filter by device, application technology or peripheral/feature before loading the project directly for use.
Expansion board hub (EBH) is an extension to NXP’s SDK Builder site where
developers can find a range of add-on boards from NXP and partners to extend the capabilities of the chosen evaluation board.
This hub gives intuitive filtering to quickly find boards and locate available supporting software. Developers can pair their
board with different kinds of shields to evaluate and do rapid prototyping for specific use cases or applications.
NXP's Comprehensive Solution Offering for Motor Control in Mobile Robotics
NXP's MCX portfolio of microcontrollers represent a significant advancement in motor
control technology, offering a comprehensive suite of peripherals specifically designed to optimize motor control in mobile robotics applications. The FlexPWM module provides the flexibility and reliability needed for precise motor control, while the Quadrature Decoder
(QDC) module delivers accurate position and speed feedback necessary for closed-loop control systems. The AND/OR INVERT
(AOI)/Event Generator (EVTG) modules adds a layer of programmable logic, enabling developers to create custom hardware triggers
and offload event detection from the main processor.

