Current Controller (CC) eTPU Function
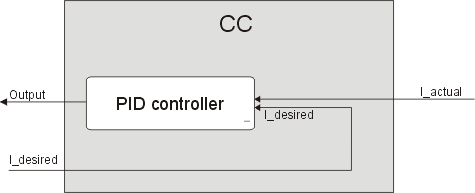
The CC function is not intended to process an input or output signal. The purpose of the CC function is to control another eTPU function’s input parameter. The CC function includes a controller algorithm. The controller calculates its output based on two inputs: a measured value and a desired value. The measured value is usually provided by the analog sensing for DC motors (ASDC) function, that preprocesses the measured analog values. The desired value is a CC function parameter, and can be provided by the CPU or another eTPU function. In the motor-control eTPU function set, this function mostly provides the current closed loop. The controller algorithm is a general proportional-integral-derivative (PID) algorithm. It can be configured as PI or PID controller.
For full description refer to AN2844.